SMO - Design and implementation of the control architecture for a phenotyping robot
SMO is a machine builder providing customized machines, industrial automation and technical constructions who has invested in the development of automated systems for plant phenotyping (https://www.wiwam.be/) for agricultural purposes. Within this product line, SMO wanted to broaden their offer with a phenotyping robot capable of navigating autonomously in open fields.
Exobotic Technologies consulted SMO about the autonomous driving of their robot based on GPS, but also on the setup of a solid architecture and flexible framework.
Below the different elements of the consultancy mission.
System Requirements analysis
Analysis of received documentation
Clarification meeting on location
Processing inputs from visit
Definition of system requirements in common agreement with SMO
Presentation of system requirements document & last iteration
System Architecture definition
Preliminary functional architecture, prior to the start of implementation
Documentation of the solution at the end of the project, including:
A global software architecture
A data flow diagram
Description of interfaces between components (ROS topics, bus interfaces, software interfaces)
Functional description of each component
Installation and compilation README manual
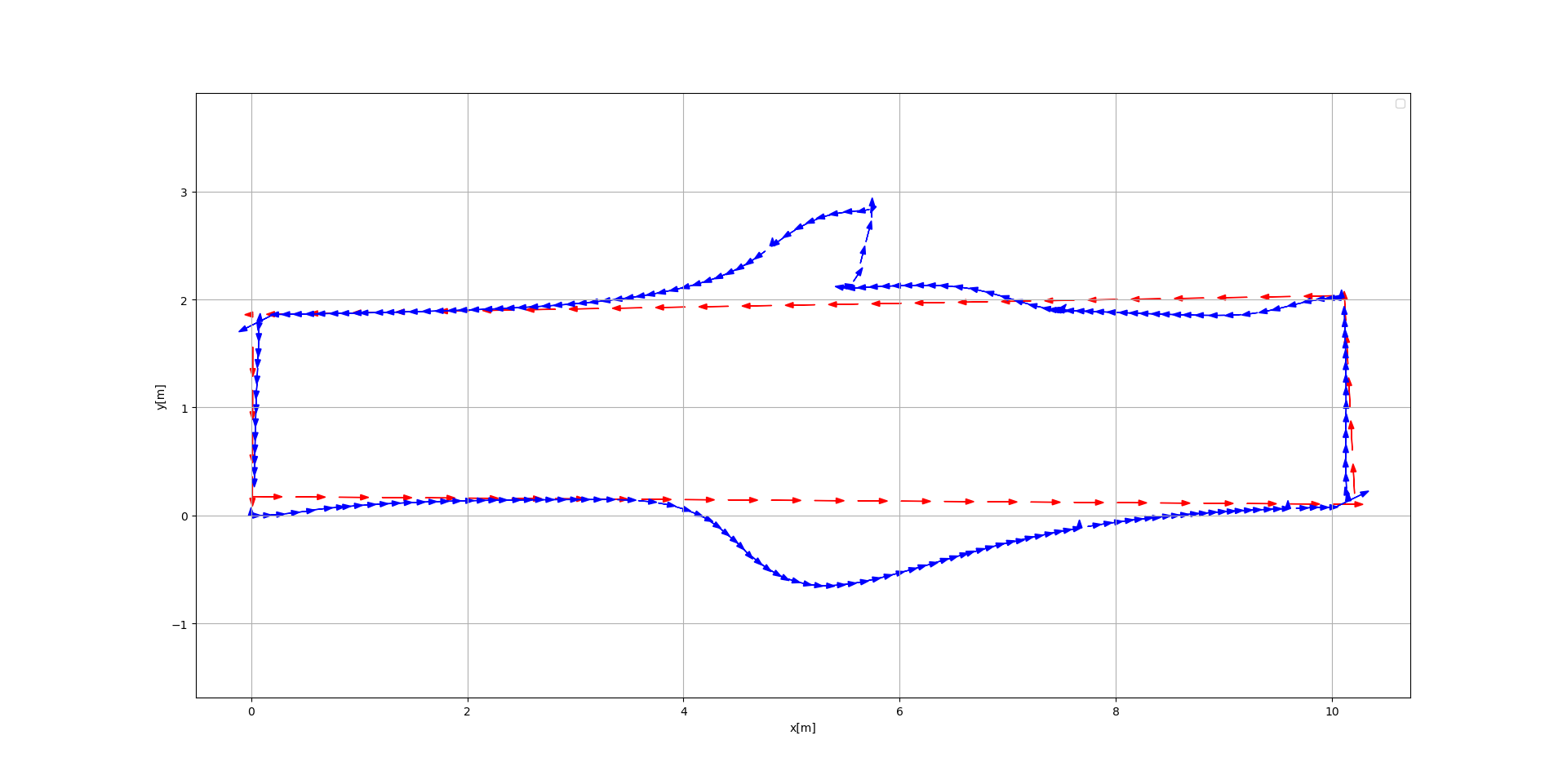
Path planning & tracking
Based on a list of GPS coordinates and additional user parameters, the path planner will create an optimal trajectory for navigation in the field
Python3-based implementation (no real-time considerations)
A basic robot tracking controller that generate velocity commands to follow optimally the trajectory presented in the previous page
Design and implementation of the controller in C++
Test and validation in simulation
Tuning and optimization of the algorithm parameters for the real robot
Test and validation on the real robot